
一、 直角坐标机器人介绍
机器人按ISO 8373定义为:位置可以固定或移动、能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在3个或3个以上自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。作为在各行各业中被广泛应用直角坐标机器人主要是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴,Y轴和Z轴,一般X轴和Y轴是水平面内运动轴,Z轴是上下运动轴。在一些应用中Z轴上带有一个旋转轴,或带有一个摆动轴和一个旋转轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。直角坐标机器人不仅经济性好,编程简单和易维修,而且可以方便组合成各种样式结构的机器人,其带载能力从10公斤到几吨,超大行程到几十米,zui高运行速度可达到每秒8米,加速度可达到每秒4米,重复定位精度可达到0.05mm或0.01mm。
在现代化制造业中,经常要把几百公斤到上吨的工件从一个工位搬到另一个工位。搬运过程有时是2D的XZ方式运动,有时是3D的XYZ方式运动,有时搬运到位后还要把工件转动90度。而搬运一般要求几个方向同时运动,速度通常是30米/分到60米/分,zui大加速度可达到2m/s2,当上下运动的Z轴较长时,几个方向同时减速会产生非常强大的冲击力和晃动。而在很多应用中对晃动要求很小,定位精度通常达到0.1mm。直角坐标机器人非常适用上面的这些要求,但在实际应用中有很多参数必须经过严格计算来确定,下面结合一个应用例子来介绍龙门式机器人是如何实现大负载大行程高速运转的。
二、任务描述
在一些大型精密机械和机电设备的生产过程中,对于需要经常传动但又要防止生锈的工件来说,油浸处理就非常的必要。本项目中需要搬运的工件及对应抓取手爪的总重量为350kg,其水平运动距离为4米,而上下运动行程为2米,运行速度为1米/秒。那么采用龙门机器人搬运就显得非常的必要。本项目为浸油输送线的一部分,用机械手浸油,浸油输送线主要完成自动上下料、机械手搬运浸油、吹气淋油、工件输送、码箱、输送到穿梭车等工作。工件输送都是放在浸油筐中来实现,避免了工件间,及工件和操作台、输送轨道间的磕碰,即保证了工件的质量,又达到了工件浸油防锈的目的。
输送线的起始部分为工件存放处,主要功能就是把加工车间加工完成的齿轮、轴等工件放到浸油筐中,然后由中转小车把若干浸油筐运到上料输送辊道上,然后由机器人抓取浸油。浸油机械手为浸油过程的主要设备,当通过前段的辊道输送线把浸油筐输送到位后,定位系统完成浸油筐的定位,定位准备好后发给机械手上料指令;机械手在左端就绪位置下降500毫米,然后抓取浸油筐后上升200毫米,XZ轴再同时运动,其中Z轴上升300毫米,X轴高速运动2000毫米。这时浸油筐到达油箱的上方,要下降2000毫米及停顿2秒保证充分浸油,然后上升2000毫米后继续右行,右行到位下降,机械手把浸油筐放到输送线上,继续前行准备吹气淋油,机械手返回到左端的原始位置,准备对下一浸油筐进行浸油。
三、选型理论分析
针对该任务要求及现场空间位置限制,我们先选定机器人的形式是二维XZ直角坐标机器人,然后进行运动节拍和速度分析。根据速度分析得出各个轴各自的zui大加速度和减速度。然后再计算出单独运动和两轴同时运动时产生的zui大冲击力。这里计算出XYZ三个方向的zui大冲击力Fx,Fy和Fz及产生的扭曲力矩Mx,My和Mz。当XZ两个轴同时减速时的zui大冲击力是合成减速度,要以合成减速度来计算Fx,Fy和Fz及产生的扭曲力矩Mx,My和Mz。在计算不同轴扭曲力矩Mx,My和Mz时要考虑等效负载的重心位置,总重力和减速时产生的冲击力。
Z轴选型分析:在选择上下运动的Z轴时,根据先面计算出的zui大冲击力Fx,Fy和Fz及产生的扭曲力矩Mx,My和Mz,采用了两根Roboworker RSL90运动轴和120mm宽超强齿型带组成的复合轴。由于总长度几乎达到了3米,在X轴以1米/秒速度下快速减速时对Z轴产生非常强大的冲击力和晃动。为了有更大的抗冲击能力和产生小的晃动,对两根RSL90运动轴我们采用四个超长滑块,上下两端采用40毫米厚的高强度连接铝板。选用的120mm宽超强齿型的额定拉力是2000 KG,破坏拉力达7000 KG。Z轴的实际带载能力可达800 KG,带350KG的负载可以长期可靠工作。
X轴选型分析:采用了两根5米长的德国Roboworker RSL90运动轴,每根运动轴带两个滑块。单个300mm滑块RSL90型运动轴的zui大负载能力可达360KG,这里采用的双滑块刚性联结负载能力可以增加5倍。当把两根运动轴并排刚性连接起来使用时,其负载能力可以增加2倍,所以这里采用的双轴双滑块结构其负载能力可增加到2吨。而负载(含手爪),Z轴及Z轴与X轴的连接板和驱动电机等总重量大约600 KG,所以两根运动轴四滑块结构完承受600KG负载及加减速时产生的冲击力。两根X轴铝材的底面与支架上面钢板全部完全接触,支架的强度很高,所以不会产生任何压力变形。
XZ轴连接板的设计:连接板的设计不仅要考虑机械方面的装配配合精度,材料的物理强度,连接螺丝杆的拉力等,更要考虑在主要受冲击方向加大加强连接板,必要时增加连接板。主要螺丝杆和螺丝帽要加胶,以防长期振动后变松动。
四、电机和驱动器选型:
该机器人的运行速度达1米/秒,加速度2m/s2,,选择的驱动电机必须有足够的驱动力,通常要比理论计算值高出100%。选择Z轴电机时要考虑Z轴和负载的自重,整个Z轴运动的加速力和磨擦力。选用德国Neugart精密行星减速机和德国带抱闸的伺服电机,负载的转动惯量与驱动电机的转动惯量比值为5.12,实际zui大出力比所需求的zui大出力超出289%,安全系数为289%。X轴的驱动选用德国Neugart精密行星减速机和德国产伺服电机,负载的转动惯量与驱动电机的转动惯量比值为6.82,出力安全系数为212%。数控系统选用德国恩格哈公司的D22数控系统。该系统稳定性高,易二次开发,这里主要用G代码G01和G04。
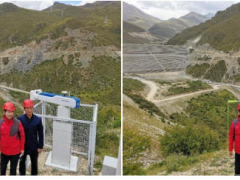
现场安装:机器人在加速和减速时会产生强大的冲击力,而且通常每天要工作24小时,所以机器人必须被牢固地安装在支架上。机器人的支架要有足够的抗冲击力,要有地脚,以保证在长期高速高动态运动冲击下,没有任何晃动。此外在安装时要保证运动轴间的平行度、平面度和垂直度。右面的图像是现场安装后的照片。
五、结论
采用ROBOWORKER公司的机器人后使上面的产品生产速度和质量大为提高,而且省去大量人力和财力。该机器人运行半年后就收回所投入的成本。该机器人运行一年来非常平稳可靠,在正常维护下至少运行十年。这是沈阳莱茵机点公司2007年在国内目前做成的zui大负载机器人,从中积累了许多实际经验,为以后其它应用提供更大行程,更大负载的高动态龙门机器人和悬臂机器人打下了很好的基础。目前还有两台500公斤负载,大约4*2*1米有效行程的上下料机器人正在进行中。随着大批量全自动化生产工业的迅猛发展,这类直角坐标机器人将具有更加广范的市场前景和发展潜力!
我国首台套矿山智能运载机器人“上岗”
智能化建设是矿山安全高质量发展的核心技术支撑,对实现矿山减人增安提效、促进能源绿色低碳转型有着重要意义。5月5日,中国科学院自动化研究所、国际先进技术应用推进中心、中国矿业大学(北京)内蒙古研究院、中科慧拓公司联合孵化的矿山智能运载机器人“载山CarMo”在内蒙古鄂尔多斯正式发布。据了解,这是我国首台套
0评论2023-06-051495
世界首个机器人矿工上岗,智慧矿山终局或将加速到来
4月,AI大模型大热的背后,人工智能的商业落地也正如火如荼的展开。一年前,百度发布了L4级自动驾驶能力的汽车机器人RT6,其25万的成本引起了不小的轰动,对比上一代产品大幅下降了一半,而原因主要归功于RT6针对场景进行了深度定制。RT6专注出行市场,大幅精简了驾驶员相关配置,驾驶舱的仪表盘、中控屏、方向盘等都不再需
0评论2023-05-112030
我国自主研发新能源矿山智能运载机器人“上岗”
矿山是无人驾驶技术有望率先落地的重要场景之一。由我国自主研发的“载山”新能源矿山智能运载机器人5月6日正式“上岗”。据介绍,“载山”5月6日开始在内蒙古自治区鄂尔多斯市东胜区露天煤矿进行无人编组作业运行。“矿山智能化、无人化对推进矿山安全高质量发展具有重要意义。”中国科学院自动化研究所研究员、中科慧拓CE
0评论2023-05-103182
我国自主研发新能源矿山智能运载机器人“上岗”
矿山是无人驾驶技术有望率先落地的重要场景之一。由我国自主研发的“载山”新能源矿山智能运载机器人5月6日正式“上岗”。据介绍,“载山”5月6日开始在内蒙古自治区鄂尔多斯市东胜区露天煤矿进行无人编组作业运行。“矿山智能化、无人化对推进矿山安全高质量发展具有重要意义。”中国科学院自动化研究所研究员、中科慧拓CE
0评论2023-05-082484
矿山巡检不再难 智能机器人可代劳
狭窄的空间、高温的环境,对于铁矿工人来说,过去每次对井下变电所的巡检都是一次煎熬。“过去一圈巡检下来,上衣都贴在身上,头发尖直往下淌水。而现在工作环境发生了巨变,我们坐在宽敞明亮的智慧管控中心,每天只要定时查看上传回来的巡检数据,工作就完成了。”4月中旬,鞍钢矿业眼前山铁矿员工向科技日报记者谈及工作
0评论2023-04-194852
“机器人+矿山”产业融合发展高峰论坛将召开
中煤科工机器人科技有限公司与《智能矿山》杂志社联合举办的以“矿山智能化建设视角下的‘机器人+矿山’产业协同推进”为主题的“中国‘机器人+矿山’产业融合发展高峰论坛”暨“第二届《智能矿山》理事会、特约编辑年会”拟于3月24日在深圳召开。
0评论2023-03-06967
- 长勘院科研成果:安全与环境机器人广义巡检管理系统
0评论2022-12-29
专家报告|西安量子智能科技有限公司营销总监胡剑峰将在大会上作《矿山危险环境下智能作业机器人及其系统的应用探索》 的精彩分享
中国机电产品流通协会、中国高科技产业化研究会、中国稀土产业大数据平台、中国稀土功能材料产业创新联盟、矿库网等作为矿山智能化新装备与新技术的推进转化的综合服务平台和高校,携手国内外智慧矿山解决方案提供商、智能装备制造商、智慧矿山应用企业将于2023年4月9-11日在赣州召开《矿库网2023(第二届)智慧矿山与智能装备高峰论坛》,论坛以“升级智能装备,打造智慧矿山,共赢数字经济”为主题。
0评论2022-10-116395
全自动穿剑式打包机
型号:
TW-105A
技术指标:
电源功率:380V/50HZ 750W/5A 打包速度:〈=40秒/道台面高度:可根据需要定作 框架尺寸:可根据需要定作 捆扎形式:平行1~多道,方式有点动,手动,脚蹋开关 适用包带:厚(0.55-1.2)mm 宽(9-15)mm 电器配置:LGPLC控制 法国TE 日本OMRON MCN电器 适合特别宽的物品捆报
产品说明::
1.电机+减速机+
0评论2021-03-06476
环卫机器人丨“小巧玲珑”——智能纯电动微型扫路机
:技术创新的浪潮奔涌向前,引领产业发展,本期为大家介绍的是智能纯电动微型扫路机。1.产品介绍智能纯电动微型扫路机看似是普通的扫路机,却蕴含自动化程度极高的控制系统,作业装置全由一键控制,操作简便。它的前扫刷和中置滚刷能适应
0评论2020-12-1914830